|
は じ め に
「脳型コンピュータ」という言葉で、どのようなことを想像されるでしょうか? 脳のような動作をするコンピュータのことだろうと想像できると思いますが、何が脳のようなのか明確なイメージが掴めないと思います。これは、脳と既存コンピュータの違いが明確でないということにも通じます。
人間の脳は生まれて、幼児期に様々な体験を積み、生きることの楽しさを学びます。成長し、青年期には、生涯の目標を見つけ、自分の職業に必要な技術や知識を学び、その目標を達成しようと努力します。それに対して、コンピュータはプログラマの埋め込んだ知識や論理をもとに、出来るだけ速く、結果を出すように設計されています。
両者の決定的な違いは、脳は目標を達成しようという努力にこそ意味があり、コンピュータは結果の正確さや速さに意味があることです。脳型コンピュータとは、脳の原理で成長する能力を持ちながら、人間のために存在する工学産物です。つまり、人間が与えた目標の実現のため自分で努力し、より良い結果を正確に高速に得ることで性能が判定される機械です。
神経細胞を電子回路で実現する
脳が神経細胞の巨大な集合体であることはご存知のとおりですが、神経細胞は学習しながら、自分の役割を果たすために樹状突起と線維を伸ばして、神経回路を形成していきます。人間が情報処理のデバイスとして開発した、半導体で形成される集積回路は、残念ながら工場で製造したあとに変更することは不可能です。しかし、半導体メモリ技術とディジタル信号処理技術の進歩は、仮想的に神経細胞の実現と自由な回路構築を可能にしました。この擬似細胞を用いて、学習する神経回路を仮想的に実現することを最初に考えてみましょう。
図1 神経細胞のモデル
|
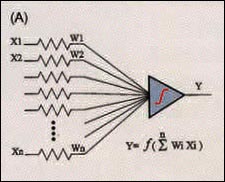
(A) アナログ回路の簡素化モデル |
-
|
神経細胞同士は互いにシナプスを介して接続されています。1個の神経細胞の樹状突起には1万以上ものシナプスが存在し、多くの情報を集め、1個の細胞は1つの出力を軸索から送り出します。
この特徴だけを捉えてモデル化すると、図1(A)に示したような簡単な電気回路として表現することができます。学習はこの図の抵抗値を変更することでモデルに取り込むことができます。
しかし、神経細胞のもつ様々な特性(例えば、インパルス発生や不応期、複雑な化学カスケード)をこのようなアナログ的な電気回路で再現性よく実現するのは難しく、神経間の結線の変更も容易ではありません。
そこで、ディジタル信号処理によってこれらの問題を解決した電子回路の概念図を図1(B)に示します。
|
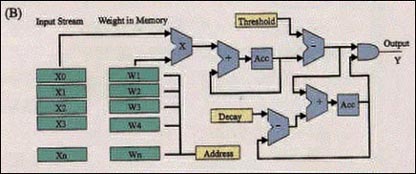
(B)ディジタル回路の機能ブロック図 |
ディジタル処理は高速なので、本来並列なシナプス入力の加算操作などを逐次演算に置き換えても十分な速度で応答できる上、様々な神経細胞の特性を信号処理回路として組み込むことで容易に仮想実現することが出来ます。しかも、神経同士の結線もデータ転送技術を応用し、自由に変更することが可能です。
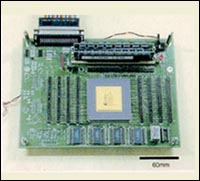
| 図2 | ディジタル信号処理で実現した脳型コンピュータ試作機 |
|
-
|
現在、研究室では、このアイデアをさらに進めて、シナプスを履歴保存のためのメモリーと考え、電子回路での実現を容易にした新しいメモリーベース・コンピュータの開発を進めています(図2)。このコンピュータは、上記の擬似神経活動の計算モデルを高速に実行する機能、および、神経活動の仕組みをシンボル化して、シンボルの変遷を記録し、シンボル間のリンクを生成する機能を実現する電子回路です。ハードウェアは、64メガバイトの半導体メモリーと10万ゲートのプログラマブル論理回路から成り立っています。
しかし、どんなにリアルな神経細胞を電子回路で実現できたとしても、それを多数集積したとしても、脳は創れないでしょう。神経細胞は脳を構成する部品ですが、脳を構成する原理ではないからです。そのためには、神経細胞が脳として構成され、情報処理の方法を獲得するための学習の原理を理解し、細胞、回路、脳への道筋をつなぐ必要があります。
|
神経回路の学習を探る
実際の脳での学習には、多くのプロセスが協調して働いています。その1つで大切なのが、大脳辺縁系に属する海馬の神経回路の働きです。海馬の働きを調べるために、光を使った計測方法を確立し、脳の学習について研究を進めています。
|
図3は、研究室で開発した超高速カメラが捉えた海馬CA1部位の活動です。左がコントロールで、右は学習のモデルである高頻度刺激を与えた後の長期増強活動を示しています。高頻度の刺激が神経の特性を変え、同じ刺激によっても、活動が大きく、そして、広範囲に伝達されるようになることが明確に分かると思います。
様々な刺激パターンや薬物効果により変更される神経回路の詳細な動作を解析し、どのようなプロセスによって脳の学習が進行するのかを理解するのがこのような実験の目的です。
ここで得られた結果をコンピュータの設計やプログラムに反映させることで、学習における神経細胞の特性変化と神経回路の挙動をつなぐことが出来ると考えています。
|
-
|
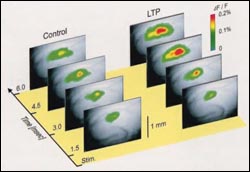
| 図3 | 膜電位感受性色素と高速カメラで可視化した海馬CA1領域の長期増強現象 |
|
目標のため努力するコンピュータ
人間には生きる目標があって、日々の生活はそれを実現するための努力です。脳は生きる目標(大きな目標)のための小さな目標をその時々の状況から想定し、その達成のための行動を司令します。この目標をかみ砕き、行動を決定していく能力、そのために必要な知識を動員したり、外部から得ようと努力する能力が脳の本質とも言えるでしょう。
脳型コンピュータで飛行を目指す模型ヘリコプター |
-
|
例えば、障害物を避けて、回り道をして、目標点に辿り着くような問題を考えると、大きな目標とは一見矛盾する目標を状況から選択し、自分の知識から最適な方法を考案する能力が必要なことが分かります。神経細胞が学習により機能を獲得するためには、この目標の設定機構が非常に重要です。なぜなら、脳全体に与えられた大きな目標をかみ砕き、脳の部分領域が達成すべき部分目標を設定し、さらに、そこでかみ砕かれ、神経回路や神経細胞の目標を設定し、最後にはシナプス接続の目標に帰着し、学習と回路構築が進行すると考えられるからです。
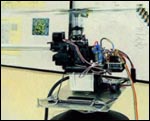
今、研究室では、飛ぶことを目標にした自動操縦ヘリコプタを作製しています(図4)。
|
飛ぶためには、ローターを回し、カメラからの映像入力を用いて、サーボモーターで姿勢制御する方法をコンピュータが自分で獲得する必要があります。5つのCCDセンサーで構成したパノラマ・カメラで捉えた映像信号を、視覚処理回路によって、XYZ各軸成分の動きなどの信号に変換します。この信号が、行動を決定するメモリーベース・コンピュータと本能的な反射に相当する擬似神経細胞回路の両方に導入されます。この2つの回路の協調的な作業で、空中で静止するための姿勢制御方法を学習によって獲得します。運動制御回路は、擬似神経の活動を実際のサーボモーターの動作角度などに変換します。
|
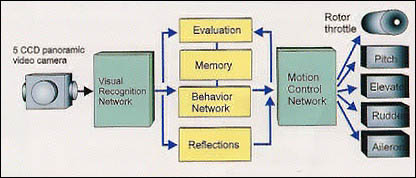
図4 脳型コンピュータで飛行を目指す模型ヘリコプターのシステム構成図 |
これは、現実の問題を対象とした目標達成のモデルで、完成できれば様々な分野に応用が考えられます。まだまだ、飛び上がることは出来ませんが、必ず、大空に舞い上がる日を迎えると信じています。
結 び
「脳を創る」という研究は、脳が持つ様々な優れた情報処理能力(例えば、画像の認識や自動制御の能力)を模倣するということではありません。人間の持つ技術手段を駆使して、自分で機能を獲得する学習能力を実現することを目指し、その中から、脳が創造された原理に近づくことが目標です。同時に、その原理に基づくコンピュータは、特定の性能では人間の脳を超えるかも知れません。「脳の理解」を目指したBSIに、なぜ、コンピュータを作る研究室があるかといえば、我々にとって「創ること」が脳を理解したいという努力に他ならないからです。
|